





智能化出入口控制系統定制開發商
 18029231761
18029231761
 18029231761
18029231761

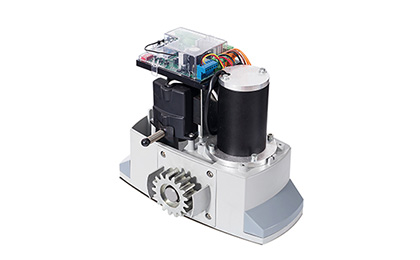
????????走地電機作為驅動地面移動設備的核心動力裝置,在工業自動化、智能設備和服務機器人領域具有不可替代的地位。與平移電機相比,走地電機專為地面移動場景設計,通過電動機與減速器的組合驅動輪式機構,實現設備在各種地形環境下的穩定移動。其技術特性與應用優勢正推動多個行業實現效率革新。
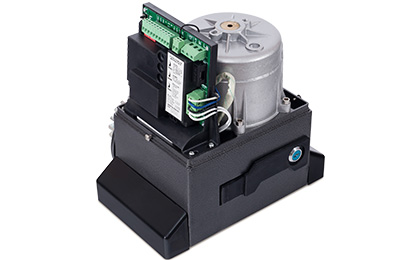
????????走地電機采用高度集成的機電一體化設計,將電動機、減速器和驅動輪組合為緊湊單元。這種結構不僅減小了設備的整體體積和重量,還通過優化傳動路徑減少能量損失。電機外殼采用強化工程材料,具備優異的防塵、防震和耐沖擊性能,可適應工廠車間、戶外環境等多種復雜工況,在持續高強度運行條件下保持穩定輸出。
????????通過先進的控制算法與驅動技術,走地電機實現從低速高扭矩到高速平穩運行的寬范圍調速能力。在AGV小車等應用中,電機響應時間可控制在毫秒級,支持設備實現厘米級精確定位和靈活避障。針對不同地面材質(如地毯、瓷磚、水泥地),電機可自動調整輸出功率與轉速,在保證牽引力的同時避免打滑現象。
現代走地電機普遍采用無刷直流或永磁同步技術,能量轉換效率可達85%以上,顯著高于傳統傳動系統。小型輕量化設計大幅降低設備整體能耗,在同等電池容量下延長移動設備工作時間30%以上。智能休眠與功率自適應功能進一步優化能源利用,使設備在待機或低負載狀態下自動進入節能模式。
????????通過特殊設計的驅動輪結構與扭矩分配算法,走地電機可應對坡度≤15°的斜坡、5mm以下地面縫隙以及潮濕、油污等特殊環境。在倉儲物流場景中,配備差速控制系統的雙走地電機組合,能實現零半徑轉向與精準軌跡跟蹤,極大提升在狹窄通道內的操控靈活性。
????????在智能掃地機器人領域,走地電機通過動態功率調整技術,可自動識別地毯區域并瞬時提升扭矩輸出20%-40%,確保清潔效果;而在硬質地面上自動切換為高效模式,提升移動速度30%以上,顯著縮短清潔時間。
????????現代走地電機普遍配備標準通信接口(如CAN總線、RS485),可無縫接入設備控制系統。通過內置傳感器實時反饋轉速、溫度、負載狀態等參數,結合云端數據分析實現預測性維護。在智能工廠場景中,多臺裝備走地電機的AGV通過5G網絡實現集群協作,自動優化物流路徑,提升整體作業效率。
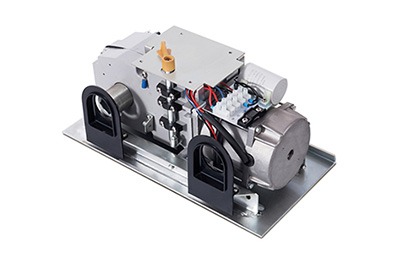
????????走地電機采用標準化安裝接口與參數配置,支持快速更換與跨平臺應用。功率范圍覆蓋50W至5kW,滿足從小型服務機器人到重型物流設備的動力需求。開放式控制協議支持與主流PLC、ROS等系統對接,大幅縮短設備開發周期,降低集成難度。
????????掃地機器人通過雙走地電機系統實現精準路徑規劃與越障,配合吸塵電機完成全屋清潔。動態功率調整技術使其在不同地面材質上自動優化牽引力與能耗。
????????AGV智能小車搭載高扭矩走地電機,負載能力達1.5噸,支持8小時連續運行。通過激光SLAM導航實現厘米級定位精度,在汽車制造、電商倉儲場景中承擔物料轉運任務。
????????防爆型走地電機驅動危險環境巡檢機器人,在石油化工、地下管廊等場景執行監測任務。強化密封結構與無火花設計滿足ATEX防爆認證要求,適應復雜工況。
????????走地電機憑借其緊湊可靠的結構設計、寬范圍精準調速能力、高效節能特性以及強大的環境適應性,已成為地面移動設備的核心驅動力。隨著永磁材料與智能控制技術的持續突破,新一代走地電機正向更高功率密度、更低能耗、更強環境感知能力方向發展。在工業4.0與智能服務設備快速普及的背景下,其技術優勢將進一步推動自動化物流、智能清潔、特種作業等領域的革新進程,為現代產業創造顯著效益。